
Hay pocos entornos tan implacables como el océano. Sus patrones climáticos impredecibles y las limitaciones de las comunicaciones han dejado vastas franjas del océano sin explorar y envueltas en misterio.
“El océano es un entorno fascinante con una serie de desafíos actuales, como los microplásticos, la proliferación de algas, la decoloración de los corales y el aumento de las temperaturas”, dice Wim van Rees, profesor de desarrollo profesional de ABS en el MIT. “Al mismo tiempo, el océano ofrece innumerables oportunidades, desde la acuicultura hasta la recolección de energía y la exploración de muchas criaturas oceánicas que aún no hemos descubierto”.
Los ingenieros oceánicos y los ingenieros mecánicos, como van Rees, están utilizando los avances en computación científica para abordar los numerosos desafíos del océano y aprovechar las oportunidades. Estos investigadores están desarrollando tecnologías para comprender mejor nuestros océanos y cómo tanto los organismos como los vehículos fabricados por humanos pueden moverse dentro de ellos, desde la microescala hasta la macroescala.
Dispositivos submarinos bioinspirados
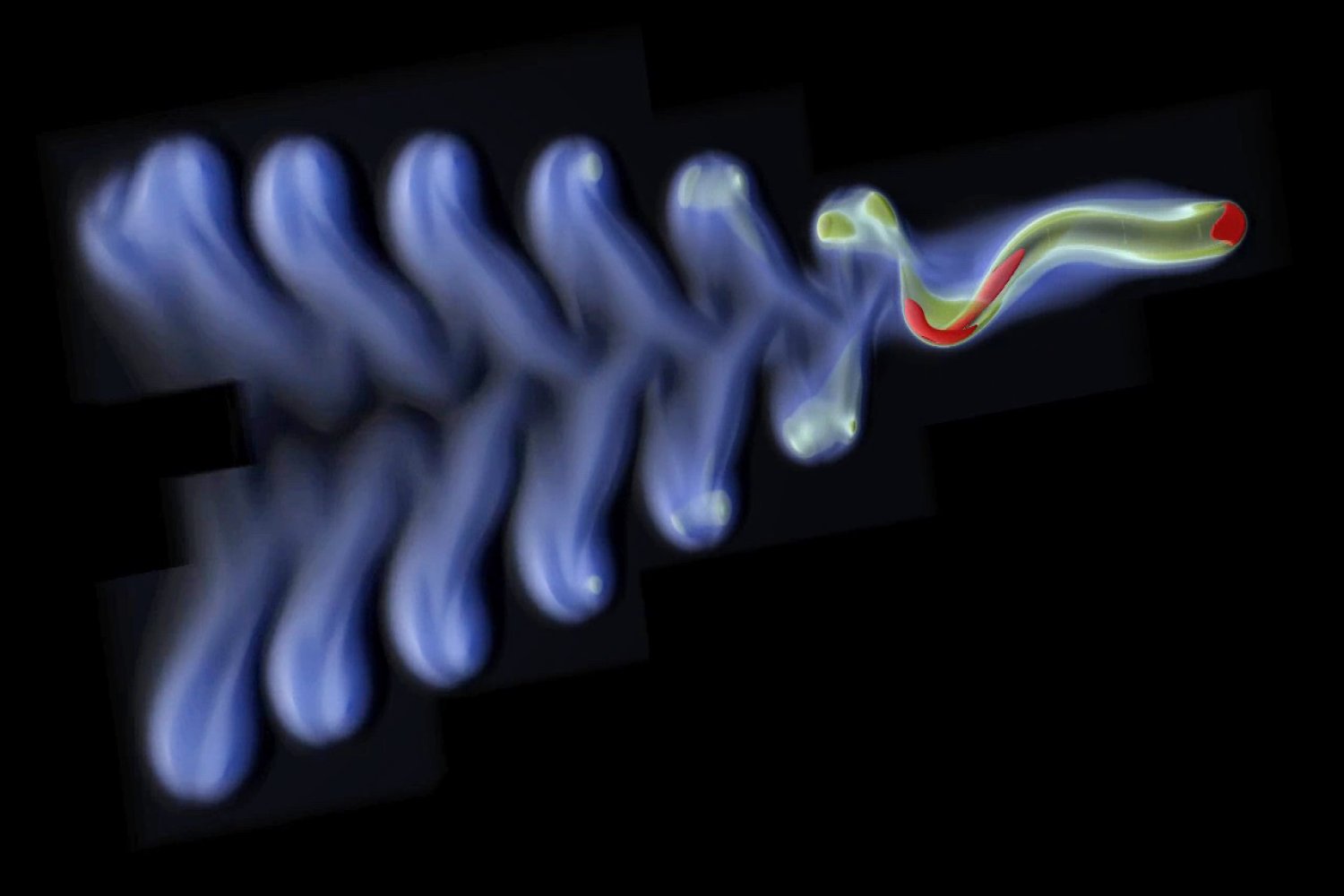
Un intrincado baile tiene lugar cuando los peces zumban en el agua. Las aletas flexibles se agitan dentro de las corrientes de agua, dejando tras de sí un rastro de remolinos.
“Los peces tienen una musculatura interna intrincada para adaptarse a la forma precisa de su cuerpo y aletas. Esto les permite esforzarse de muchas maneras diferentes, mucho más allá de lo que cualquier vehículo hecho por el hombre puede hacer en términos de maniobrabilidad, agilidad o adaptabilidad”, explica van Rees.
Según van Rees, gracias a los avances en la fabricación aditiva, las técnicas de optimización y el aprendizaje automático, estamos más cerca que nunca de replicar aletas de peces flexibles y cambiantes para su uso en robótica submarina. Por lo tanto, existe una mayor necesidad de comprender cómo estas aletas blandas afectan la propulsión.
Van Rees y su equipo están desarrollando y utilizando enfoques de simulación numérica para explorar el espacio de diseño de dispositivos submarinos que tienen mayores grados de libertad, por ejemplo, debido a aletas deformables similares a las de los peces.
Estas simulaciones ayudan al equipo a comprender mejor la interacción entre el fluido y la mecánica estructural de las aletas blandas y flexibles de los peces a medida que se mueven a través de una corriente de fluido. Como resultado, pueden comprender mejor cómo las deformaciones en la forma de las aletas pueden dañar o mejorar el rendimiento de la natación. “Al desarrollar técnicas numéricas precisas e implementaciones paralelas escalables, podemos usar supercomputadoras para resolver qué sucede exactamente en esta interfaz entre el flujo y la estructura”, agrega van Rees.
Al combinar sus algoritmos de simulación para estructuras submarinas flexibles con técnicas de optimización y aprendizaje automático, van Rees tiene como objetivo desarrollar una herramienta de diseño automatizada para una nueva generación de dispositivos submarinos autónomos. Esta herramienta podría ayudar a los ingenieros y diseñadores a desarrollar, por ejemplo, aletas robóticas y vehículos submarinos que puedan adaptar de forma inteligente su forma para lograr mejor sus objetivos operativos inmediatos, ya sea para nadar más rápido y de manera más eficiente o para realizar operaciones de maniobra.
“Podemos usar esta optimización e inteligencia artificial para revertir el diseño dentro de todo el espacio de parámetros y crear dispositivos inteligentes y adaptables desde cero, o usar simulaciones individuales precisas para identificar los principios físicos que determinan por qué una forma funciona mejor que otra”. explica van Rees.
Algoritmos de enjambre para vehículos robóticos
Al igual que van Rees, el investigador principal Michael Benjamin quiere mejorar la forma en que los vehículos maniobran en el agua. En 2006, entonces un posdoctorado en el MIT, Benjamin lanzó un proyecto de software de código abierto para una tecnología de timón autónomo que desarrolló. El software, utilizado por empresas como Sea Machines, BAE/Riptide, Thales UK y Rolls Royce, así como la Marina de los Estados Unidos, utiliza un nuevo método de optimización multiobjetivo. Este método de optimización, desarrollado por Benjamin durante su trabajo de doctorado, permite que un vehículo elija de forma independiente la dirección, la velocidad, la profundidad y la dirección en la que debe ir para lograr múltiples objetivos simultáneos.
Ahora, Benjamin está llevando esta tecnología un paso más allá al desarrollar algoritmos de evasión de obstáculos y enjambres. Estos algoritmos permitirían que decenas de vehículos no tripulados se comuniquen entre sí y exploren una determinada parte del océano.
Para empezar, Benjamin está tratando de dispersar mejor los vehículos autónomos en el océano.
“Digamos que quieres lanzar 50 vehículos en una sección del Mar de Japón. Queremos saber: ¿Tiene sentido dejar los 50 vehículos en un solo lugar o dejarlos en una nave nodriza en ciertos puntos de un área determinada? explica Beniamino.
Él y su equipo han desarrollado algoritmos que responden a esta pregunta. Usando tecnología de enjambre, cada vehículo comunica periódicamente su posición a otros vehículos cercanos. El software de Benjamin permite que estos vehículos se dispersen en una distribución óptima para la porción del océano en la que operan.
En el corazón del éxito de los vehículos de enjambre está la capacidad de evitar colisiones. La prevención de colisiones se complica por las regulaciones marítimas internacionales conocidas como COLREGS, o “Reglamentos de colisión”. Estas reglas determinan qué vehículos tienen el “derecho de paso” cuando se cruzan, lo que representa un desafío único para los abundantes algoritmos de Benjamin.
COLREGS están escritos desde la perspectiva de evitar otro contacto único, pero el algoritmo de Benjamin tenía que tener en cuenta varios vehículos no tripulados que intentaban evitar colisiones entre sí.
Para abordar este problema, Benjamin y su equipo crearon un algoritmo de optimización de objetos múltiples que clasificaba maniobras específicas en una escala de cero a 100. Un cero sería una colisión directa, mientras que 100 significaría que los vehículos evitan la colisión por completo.
“Nuestro software es el único software marítimo donde la optimización multiobjetivo es la base matemática fundamental para la toma de decisiones”, dice Benjamin.
Mientras que investigadores como Benjamin y van Rees utilizan el aprendizaje automático y la optimización multiobjetivo para abordar la complejidad de los vehículos que se mueven a través de entornos oceánicos, otros como Pierre Lermusiaux, el profesor Nam Pyo Suh del MIT, utilizan el aprendizaje automático para comprender mejor el entorno oceánico en sí.
Modelado y predicción oceánicos mejorados
Los océanos son quizás el mejor ejemplo de lo que se conoce como un sistema dinámico complejo. La dinámica de fluidos, las mareas cambiantes, los patrones meteorológicos y el cambio climático hacen del océano un entorno impredecible que cambia de un momento a otro. La naturaleza siempre cambiante del entorno oceánico puede hacer que las predicciones sean increíblemente difíciles.
Los investigadores utilizaron modelos de sistemas dinámicos para hacer predicciones sobre los entornos oceánicos, pero, como explica Lermusiaux, estos modelos tienen sus limitaciones.
“No se puede contar cada molécula de agua en el océano al desarrollar modelos. La resolución y precisión de los modelos y las mediciones oceánicas son limitadas. Podría haber un punto de datos del modelo cada 100 metros, cada kilómetro o, si está buscando modelos climáticos del océano global, podría tener un punto de datos cada 10 kilómetros más o menos. Esto puede tener un gran impacto en la precisión de tu pronóstico”, explica Lermusiaux.
El estudiante de doctorado Abhinav Gupta y Lermusiaux han desarrollado un nuevo marco de aprendizaje automático para ayudar a compensar la falta de resolución o precisión en estos modelos. Su algoritmo toma un modelo simple con baja resolución y puede llenar los vacíos emulando un modelo más preciso y complejo con un alto grado de resolución.
Por primera vez, el marco de Gupta y Lermusiaux aprende e introduce retrasos en los modelos aproximados existentes para mejorar sus capacidades predictivas.
“Las cosas en el mundo natural no suceden instantáneamente; sin embargo, todos los modelos predominantes asumen que las cosas suceden en tiempo real “, dice Gupta.” Para hacer que un modelo aproximado sea más preciso, el aprendizaje automático y los datos que está poniendo en la ecuación deben representar los efectos de los estados pasados en la predicción futura “.
El “modelo de cierre neuronal” del equipo, que explica estos retrasos, podría potencialmente conducir a mejores predicciones para cosas como un vórtice de Loop Current golpeando una plataforma petrolera en el Golfo de México o la cantidad de fitoplancton en una parte determinada del océano.
A medida que las tecnologías informáticas como el modelo de cierre neuronal de Gupta y Lermusiaux continúan mejorando y avanzando, los investigadores pueden comenzar a desentrañar más misterios del océano y desarrollar soluciones para los muchos desafíos que enfrentan nuestros océanos.

“Gurú de la web. Bacon ninja. Defensor de la televisión. Pensador. Quien quiera ser experto en café. Evangelista general de Internet. Estudiante de toda la vida. Explorador”.




:quality(70)/cloudfront-us-east-1.images.arcpublishing.com/elimparcial/S4HJIEJF6ZECHOBGRRNMDXN2YU.jpg)
